You may only have seen pneumatic actuators being used for simple movements before, but with Staccato Technologies’ Flexible Positioning Unit, FPU, you can do things most people think they need powerful and expensive AC-Servos for. Below, you will find some of the more common requirements. See how Staaccato technologies made pneumatics digital.
On our Youtube channel, you can find more examples.
Please feel free to contact us at order@staccatotech.se for further inquiries or questions.
Alternative high speed settings

There are several alternative speed settings in our software;
Constant speed (set max speed)
High, adjustable speed with adjustable deceleration length
Max possible speed with adjustable deceleration length
In this video, you can see the difference between the settings.
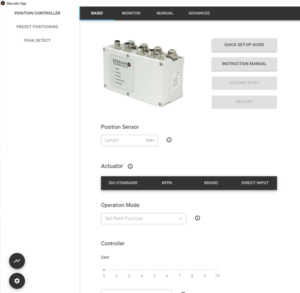 Here you get an introduction on most of the functions
Here you get an introduction on most of the functions
in the software package for the Flexible Positioning Unit, FPU.
Preset positioning with 8 positions

Manual control of 8 preset, adjustable positions
without need of external signals.
Small bore pneumatic gripper finger positioning

Finger positioning of a ∅ 12mm pneumatic gripper
Demonstration of the new 0.5mm orifice version
Force Control application example

Set the required Force in Newtons (N)
Simple demonstration on setting different force.
+/- 0.1mm visualized
Demonstration of high precision actuation.
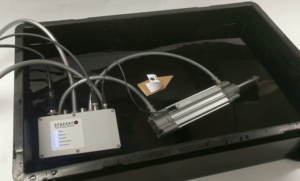
Positioning while being submerged in water.

Here we demonstrate how we use one analog input for positioning, and one analog input for stepless speed control
In some applications, you want a pre-determined state if a signal is lost. With our FPU-unit, you can choose 4 default states for when “Enable” signal is lost. You can choose:
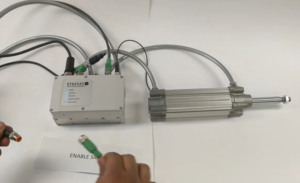
- Exhausted
- Locked position
- Fully extended
- Fully retracted
Copy Function / Paralell drive

Example of how one actuator act as “Master” to a “Slave” actuator.
The feedback from the master actuators position sensor is used as set point to the slave actuator.
Multiple stops on rotary actuator
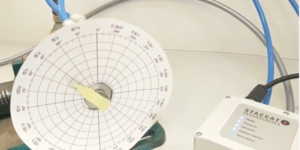 Here we show how you can control a pneumatic actuator in multiple positions. Work with vane style actuators as well as rack & pinion type.
Here we show how you can control a pneumatic actuator in multiple positions. Work with vane style actuators as well as rack & pinion type.
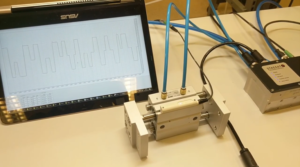 Positioning pneumatic gripper fingers in multiple stops. Set point and feedback position signal plotted on graph. Force can also be controlled.
Positioning pneumatic gripper fingers in multiple stops. Set point and feedback position signal plotted on graph. Force can also be controlled.
